What is a PID
The temperature of a production heater needs to be at a certain value for operations. It is usually set by increasing the heat and measuring the resulting temperature using thermocouples. The temperature often overshoots the target and fluctuates around the target.
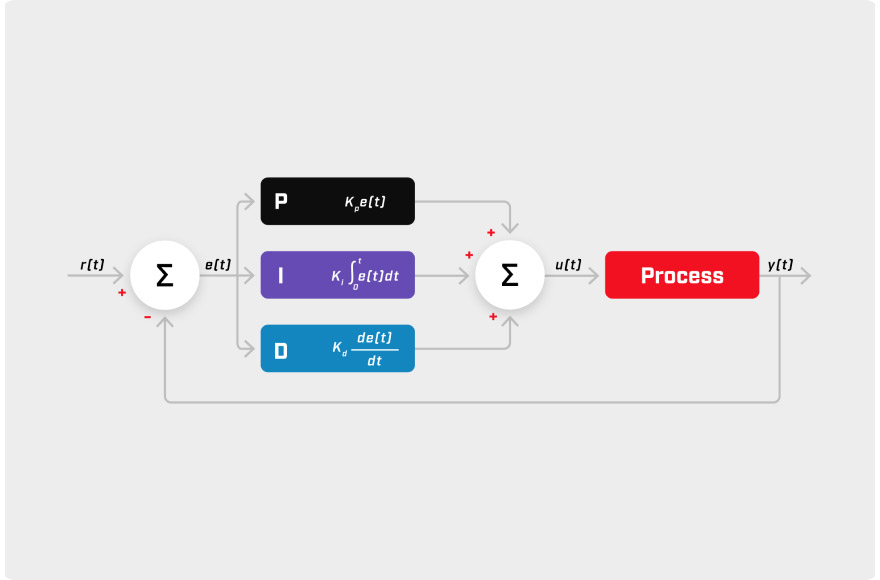
One way to set the temperature is to use a PID (Proportional, Integral, Derivative) controller. In this setup a control loop is established where the output temperature is compared with the input temperature to get an error amount. This difference undergoes proportional, integral, and derivative control and the effect is added together to get the new output.
During proportional control, a gain (Kp) is applied to the difference. During integral control, a parameter (Ki ) is applied to the integral of the difference. The integral takes into consideration the historical effect of the error term. In the derivative control, (Kd) is applied to the derivative of the difference. This takes into consideration the anticipatory effect of the error term, i.e. how it will behave in the immediate future.
By varying Kp, Ki, and Kd, the operator can tune the PID control so that it converges at the desired temperature quickly. In production heater applications the derivative term has little effect and is often set at zero.
A heater can have two PID controllers in cascade, each with its own thermocouple. The outer controller controls the temperature of the fluid using a thermocouple located far from the heater where it accurately reads the temperature of the bulk of the fluid. The error term of this PID controller is the difference between the desired bath temperature and measured temperature. Instead of controlling the heater directly, the outer PID controller sets a heater temperature goal for the inner PID controller. The inner PID controller controls the temperature of the heater using a thermocouple attached to the heater. The inner controller’s error term is the difference between this heater temperature setpoint and the measured temperature of the heater. Its output controls the actual heater to stay near this setpoint.
The proportional, integral, and differential terms of the two controllers will be very different. The outer PID controller has a long time constant – all the fluid in the tank needs to heat up or cool down. The inner loop responds much more quickly. Each controller can be tuned to match the physics of the system it controls – heat transfer and thermal mass of the whole tank or of just the heater – giving a better total response.
Profire Energy offers PF2100 and PF3100 BMS solutions. Using the PF3100 system you can reap all the advantages of PID control discussed above. To learn more about our products and solutions visit www.profireenergy.com.